“数据驱动”的模型被数据限制,关键在于,它被如何限制? —— David 9
在上一期“具身智能”的诱惑中我们就提到,智能体不会是孤立的,他处于特定的环境中,他与环境交互并适应环境,塑造环境并与之交融。
同样,在一个数学系统中,有及其相似之处。伯克利最新的研究揭示了(或部分揭示了)神经网络泛化能力的第一性原理(A First-Principles Theory)。
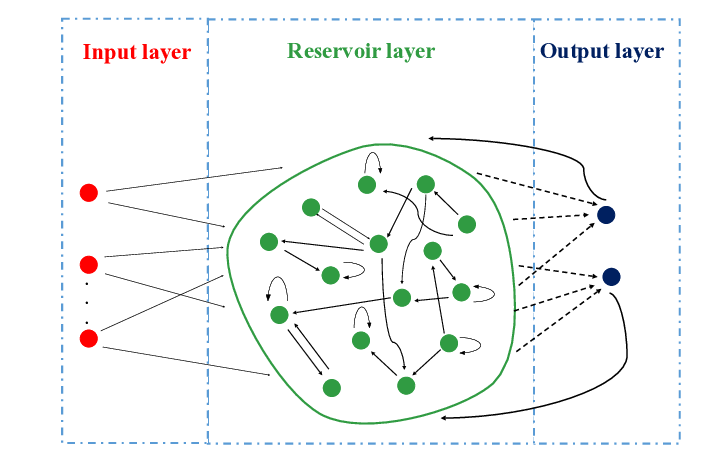
其研究大量依赖于NTK神经正切核的实验,曾经David也在星球中聊过正切核和无限宽网络,其本质上都是构建一个“核系统”,并找出一个“核回归”方法,
能够很好地近似真实分布 f:
 其中学习到的近似分布即:
其中学习到的近似分布即:![]()
而K代表的核函数即系统中衡量元素直接距离的函数。
伯克利的研究人员指出这种学习系统就是典型的核回归方法,而核回归和NTK已经神经网络的关系如下:
![]()
进一步地,对于无限宽网络和核回归方法,其对称性和半正定的性质,使得我们总可以找到一组正交的特征向量,使得每一对特征值和特征向量![]() 都满足: 继续阅读伯克利:神经网络学习能力的“第一性原理”探究
都满足: 继续阅读伯克利:神经网络学习能力的“第一性原理”探究