计算机科学很大程度上是权衡“现实”和“理想”的方法学 — David 9
3D图像的分类与分割问题,虽然理想上可以用3D卷积构造深度网络,但事实上, 其巨大计算开销不允许我们直接使用卷积对3D云图集进行训练. 试想2D卷积(GoogleNet, ResNet, Alexnet)训练时间就已经让人捉急了, 何况样本是3D云图:
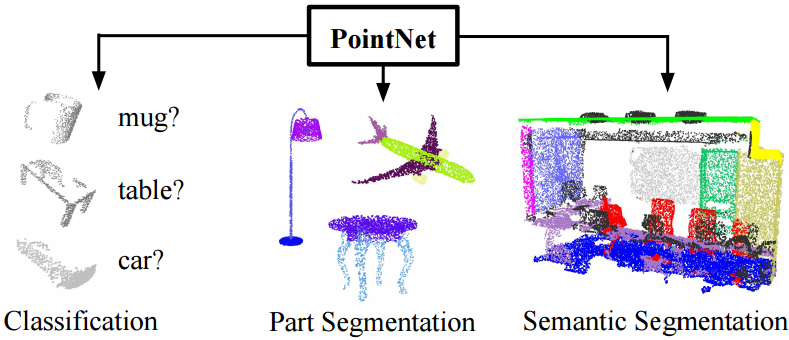
 幸运的是现实再残酷, 人类总能找到暂时解决问题的方法, PointNet就是一个权宜之计:它实现端到端3D图像(点集)分类与分割:
幸运的是现实再残酷, 人类总能找到暂时解决问题的方法, PointNet就是一个权宜之计:它实现端到端3D图像(点集)分类与分割:
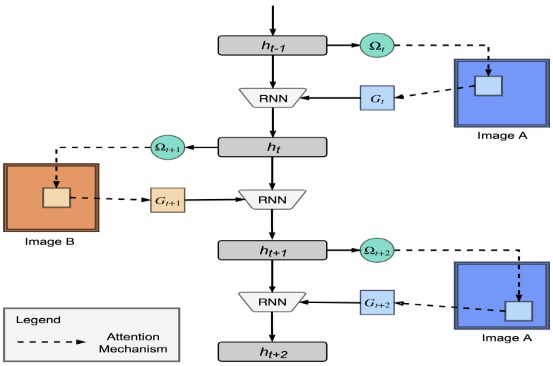
 论文不使用3D卷积, 而是用深度网络模拟通用对称函数:
论文不使用3D卷积, 而是用深度网络模拟通用对称函数:
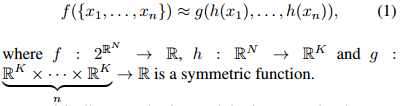
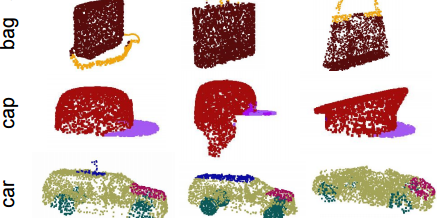
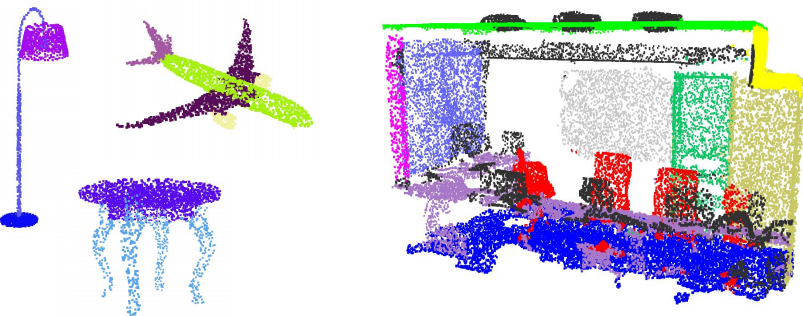
输入总共n个点的无序云图点集({x1,x2 … , xn}), 通用函数f 输出该云图分类(汽车,书桌,飞机)。 继续阅读CVPR 2017之#CNN论文精选, PointNet:端到端3D图像(点集)分类与分割